
Tsukuba Challenge
Every year, we participate in the "Tsukuba Challenge" held in Tsukuba City, Ibaraki Prefecture, Japan, with a self-propelled outdoor drone developed by the Chief Scientist Office.






What is the
“Tsukuba Challenge”
"Tsukuba Challenge" is a technical challenge held every year since 2007, in which mobile robots autonomously run in urban areas such as the sidewalk in Tsukuba. The purpose is to advance autonomous driving technology in the real environment (real world) that people usually use. It is an event where researchers and the local community cooperate to challenge advanced technologies and conduct open experiments.
For more information, please see the "Tsukuba Challenge” official page.

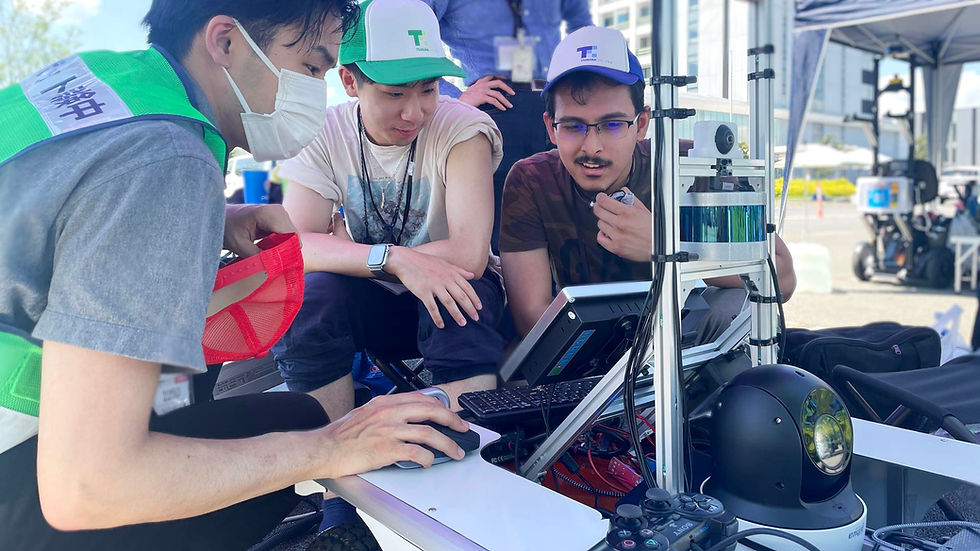
As a response to last year's retirement cause, which was getting too close to obstacles, we have improved the system to enable reverse movement. This feature allows for stable navigation even in narrow passages or environments with many obstacles.

As an indicator to display the robot's status, an LED strip has been placed around its entire perimeter. The color and pattern change according to the operating mode, allowing the robot to clearly communicate its current state to its surroundings—for example, green when moving forward and red when stopping.
Remote AI Monitoring via the Autonomous Driving Operation Platform at the Advanced Technology Research Institute
In the 2024 Tsukuba Challenge, we worked with SoftBank's Research Institute of Advanced Technology to integrate their "Autonomous Operation Platform," a system designed for autonomous vehicles.
This system enables real-time remote AI monitoring through WebRTC.
It also supports features like recording streams on the server and utilizing AI for image recognition.
For more information about the Autonomous Operation Platform, please visit the Research Institute of Advanced Technology's website.
Please see ichimill's sample code here.
https://github.com/sbgisen/ublox_rtk

We successfully completed a 2 km course and achieved Optional Task B: Signal Recognition.






